This article is literally the reason why people crave summary, because it was so content-free that it was a waste of my time to have read it all. It was a lecture extolling the virtues of repetition while simultaneously displaying none of them.
For some reason the value of Pi given in the C++ code is wrong!
It's given in the source as 3.14159274101257324219
when the right value to the same number of digits is
3.14159265358979323846. Very weird. I noticed when I went to look at the C++ to see how this algorithm was actually implemented.
seems since it's a float it's only 32-bits, and the representation of both 3.14159274101257324219 and 3.14159265358979323846 is the same in IEEE-754: 0x40490fdb
though I agree that it is odd to see, and not sure I see a reason why they wouldn't use 3.14159265358979323846
Yeah, it’s as if they wrote a program to calculate pi in a float and saved the output. Very strange choice given how many places the value of pi can be found.
Indeed... I honestly don't remember where or how I sourced the value, and why I did not use the "correct" one - I will correct in the next release of the package. Thanks for pointing it out!
Some - not all - of the EF lenses have a distance encoder as well. It's fairly approximate; I think it exists mostly for the benefit of the flash system, which needs a rough starting point for the distance in some of the open-loop modes.
For the current Olympus ones, I think there's a broadly similar encoder on the ones with proper manual focus scales, and the pure fly-by-wire ones reset focus at connection so the camera can work it out.
Even your example of discharging a capacitor can end up with a pulse both directions, caused by the inductance of the wires.
In this specific situation, there's no common reference level, and so the induced pulse will go both directions. You can think of this as being about the edges of the pulse being the parts that actually cause radio to be transmitted, and there's both a positive-going edge and a negative-going edge on a pulse.
Sign matters as well as magnitude. The pulse created will have both a positive and negative part - waveform sort of like --^v-- and so you can get either direction bit flip. It's not equivalent to connecting a battery to the pin; EMI's more like AC in that it goes both directions.
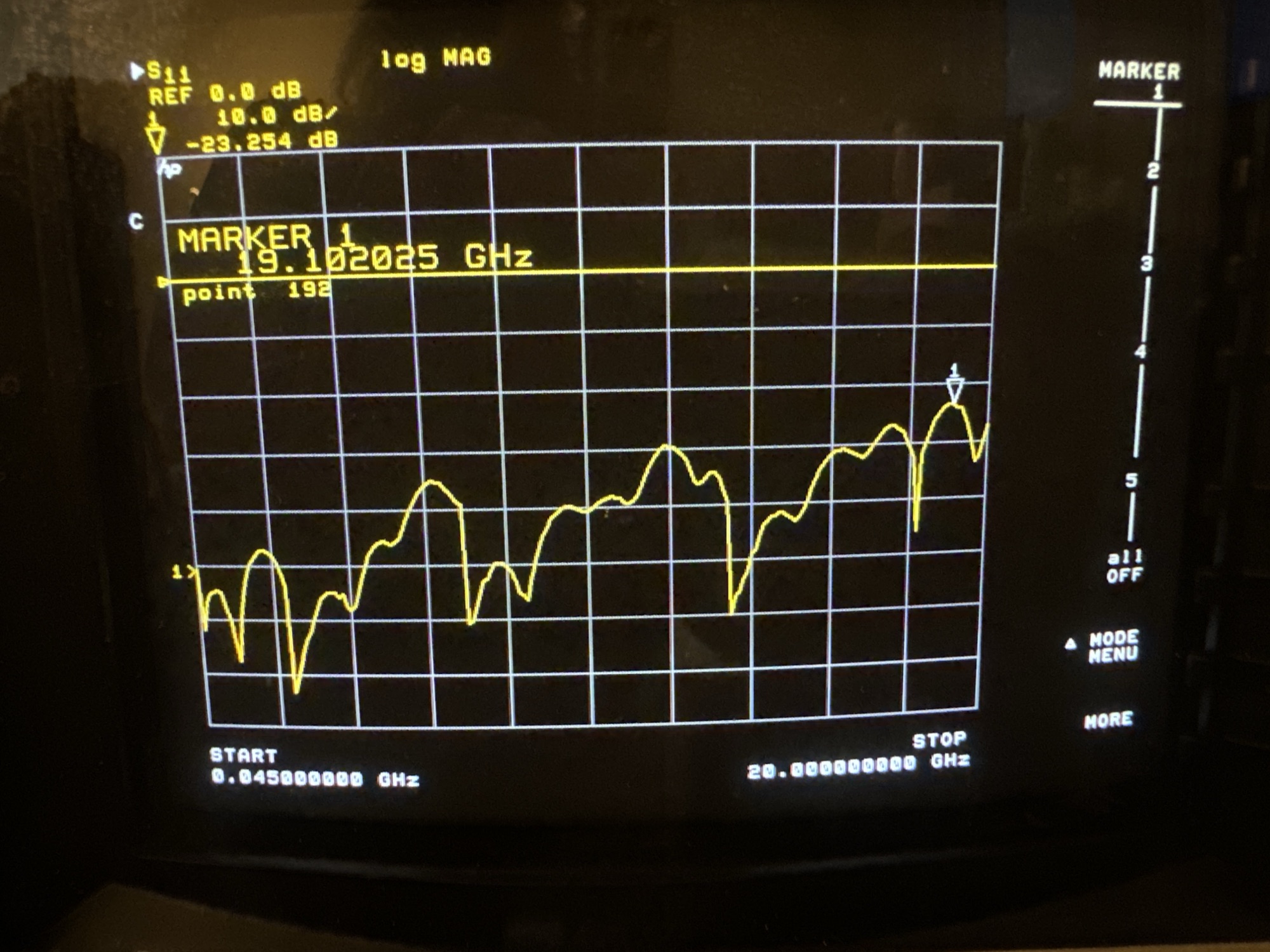
One of the few places you run into fellow 8510C users. How stable do you find your calibration on the 50GHz 83650 setup? My 20GHz one with the 8341B is very, very, very drifty for the first couple of hours after powerup (i.e. a good load goes from -60dB to about -15dB half an hour after calibration), but I'm not sure whether it's normal or something up.
That doesn't sound right at all. I mostly use mine as a TDR (50 GHz with 83651B) but I can generally reload saved calibrations from months ago, less than 5 minutes after a cold start, and still see < 50 dB return loss through 20 GHz if I look at the same load.
I'd go through the receiver channel tests in the manual and try to isolate the problem to the test set or IF box. Does S21 drift as well?
Yes, I'd expect better (though maybe not necessarily 50dB+). Troubleshooting:
1. First suspect is always a bad calibration -- they tend to be unstable in addition to incorrect, but if you have anything with known(-ish) S parameters you can check for correctness too.
2. Second step is to put it in TDR mode and watch to see where the TDR changes. That's where your problem is.
3. A trip through the test set with a torque wrench is a good way to not just check the connections but also calibrate your intuition about the couplers/mixers, which should help interpret #2. You can loosen connectors in sequence and watch them spike on TDR to zero in on the actual problem.
As it happens, I was comparing my 8510C + 8517B to a FieldFox recently and I took some drift measurements, although those were on a short rather than a load. The 8510C blew the FieldFox out of the water, lol. Given the TDR, this might be because the standard itself was temperature sensitive and the FieldFox ports are piping hot, but still.
Thanks, it's really useful to have a reference point. Having played about a bit with which device is left to warm up, I'm fairly sure it's the 85102 (IF box) that's drifting. I've also tried my old 8350B sweeper instead of the 8341B and although the pattern's very different (different band-switch points) it drifts about equally badly. The odd bit is that it looks like it's related to the sweep position - I get a sawtooth effect as it drifts, like so: https://www.jamiecraig.com/wp-content/uploads/2024/06/image....
Oh, you're in RAMP mode! Yeah, that drifts too much to hold a load calibration. This is expected behavior, it's designed to trade away precision to get speed. This will be worst on the 8350, which is completely unsynthesized, and on the upper end of each band on the 8340, which is also unsynthesized. You should see much better stability at the low end of each ramp band on the 8340 (which is synthesized) and you should be able to get that good stability everywhere if you use the 8340 source and put it in STEP mode to synthesize every point.
If you can get your hands on an 8360 source, it will synthesize both the start and end of RAMP sweeps (starting on the second sweep -- it looks to see how far off it was and corrects it), and you will also have significantly faster STEP sweeps.
A dissenting opinion on the design - for me, this presentation was like watching a video to find information; too slow paced, and it made me impatient the whole time. The original notebook format was far better in that regard. The layout within each section is beautiful, but the animation and the scroll-sensitive layout (vs. just having a series of static diagrams) makes it unpleasant for me to read.
The content's excellent and it was fascinating to see how the differences between characters and karts play out though!
> the animation and the scroll-sensitive layout (vs. just having a series of static diagrams) makes it unpleasant for me to read.
I totally agree; I don't understand the fascination HN has with these types of sites. It all feels like extraneous design just for the sake of it, rather than actually making anything easier or better to understand.
I think sites/pages like this hold an important role, presenting information to people who have trouble visualizing concepts or need visual aid to better assimilate information is important and sometimes, a simple 2D rendering or a dry graph just isn't enough.
And if you need a 3d graph, you're only a handful of lines away from smoothing out your presentation, so why not?
There's also the more subjective aspect, I think adding the effort to make something look nice and slick, animated well, could be both an interesting challenge and a relaxing pass-time. It's pleasing both to make and digest, in a way, it sits in an intersection of design, art and technique and as an added bonus, could help capture the attention of someone who struggles with short attention spans even better!
On UK plugs at least, there are shutters and you need to insert something into the earth pin slot before they will allow you to access the live/neutral pins. On better sockets, the shutters then need simultaneous pressure on both live/neutral to completely release. The actual contacts in the socket are recessed too.
UK plugs and sockets are really, really, really safe. Except to stand on.
{kind=link}
reply